
数年前からロボット支援下において外科的な手術が日本でも実施されています。
そのロボットですが、ダ・ヴィンチ(da Vinci)といい、2017年10月現在世界で4000台、日本でも270台程度稼働しています。
ダヴィンチとはアメリカのイントゥイティヴ・サージカル社が開発・販売している内視鏡手術用の支援ロボットになります。
今回はそのダ・ヴィンチとロボット支援下手術について説明していこうと思います。
目次
手術をするロボット?
手術時にロボット?とダヴィンチを知らない方が想像するとターミネーターやソフトバンクのペッパーのようなロボットが手術のお手伝いをするのかと思うかもしれません。

実は手術時に使用するロボットとはロボットアームの事で自動車の製造ラインで溶接ロボットアームがバリバリ働いていますが、イメージとしてはそちらのイメージが正しいと思います。
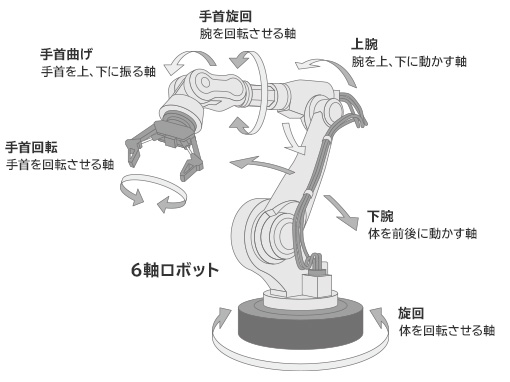
また、ターミネータやペッパーは人工知能でお話ししたり、反応したりしますが、手術時に使用するロボットは完全に人間が操作して動作させるロボットアームであり、勝手に動くような事はありません。
言い換えれば、人間が複数のロボットアームを操作して、アームが直接的に患者さんを手術するといった具合です。

写真はダ・ヴィンチによる外科手術の様子です。左側で機械に頭を入れている人が手術を行う執刀医になり、右側には手術を受けている患者とロボットアームがあります。
執刀医がコントローラーを操作する事でリアルタイムにロボットアームによる手術が行われるのです。
なぜロボットが必要なのか?
ロボットに手術を支援してもらわなくても、複数の人間で手術をしたほうがよっぽど安全で正確なような気がしませんか?
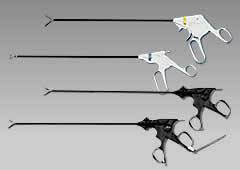
実は通常の内視鏡を用いた外科の手術はお腹の中にカメラを入れて、ミニ枝切りバサミのようなものや組織をつまむ鉗子(カンシ)というもので手術をします。下の写真が実際に使う鉗子です。このようなもので細かい作業を行います。
職人技です。
人間が操作すると、手の震えがダイレクトに鉗子などに伝わって震えたり、細かな操作を長い鉗子(カンシ)で行う為に熟練しないと難しいものなのです。
そこでロボットの登場です。
ロボットなら人間の手の震えがあってもアームで震えないような制御をしたり、人間の関節では到底できないような鉗子操作をしたり、またより細かい作業ができるように人間の手の動き対してアームの鉗子の動きを小さくできます、要は手で操作コントロールを3cm動かすとアーム先は1cm動くというようにより細かな操作が可能になるのです。
さらに、通常の内視鏡手術では立って数時間の手術を行わなければならないのですが、ロボット手術だと操作席に座って行う事ができるので、疲労度も変わってきます。
手術を担当する執刀医にとってのメリットは手術を受ける患者様のメリットでもあり、現在の普及にいたったという事です。
ダ・ヴィンチが開発された背景には遠隔地から手術をするといったメリットもあり、例えば執刀医が東京にいる状態で福岡の患者さんの手術をするといった具合です。
実際には遠隔地の手術をする事は現時点では行われていませんが、技術的には可能です。
そもそも開発理念は海外派兵で負傷した兵隊を本国アメリカの腕のいい外科医がロボット遠隔にて手術するというコンセプトで開発されたぐらいです。
ダ・ヴィンチの構成要素
サージョンコンソール
いわゆる操作席です。
ここに座って操作をします。

頭を入れていますが、覗いているのは3D画像になります。

下記画像のように内視鏡の画像が映し出され手術操作を行います。
ペイシェントカート
これがロボットアームと言われ、実際に患者さんの手術を直接的に行うロボットアームです。
カメラアームが一本と3本のアームがついています。
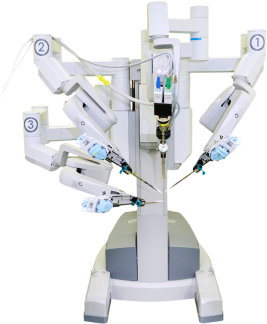
赤丸がカメラになります。
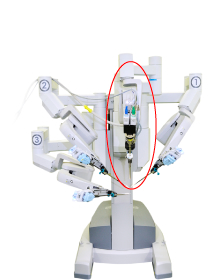
カメラは高解像度の3Dカメラになっており、画像のようにカメラの先端は(エンドスコープ)は画像のように3Dを映像を作り出す為に右・左の画像用の2つの動画を得るような仕組みなっています。。

ビジョンカート
これは3Dカメラシステムに光源を供給したり、映し出された画像を表示させたりします。

鉗子類

3本のアームで扱える鉗子にも様々なものがあります。
挟んで、つまんで、切って、電気メスと様々な形状と種類があります。
特徴は鉗子には使用回数制限があるという事です。
一般的に10回使用すると11回目より使用がでなくなります。
鉗子も1本あたり、30万円以上と高価なのでもう少し使えるようにしてもらえたら・・・っと思ってみたり。
ダ・ヴィンチの種類
現在ダ・ヴィンチは4世代のda Vinci Surgical Systemが販売されています。
第1世代 da Vinci (Standard) 1999-

ダヴィンチの開発は1980年代ころからはじめられていますが、この第一世代は初めて販売された最初の機種です。
日本ではこの機種は現在稼働していません。
初期のバージョンになります。
第2世代 da Vinci S System 2006-

2006年頃から出てきた第2世代です。よくSHDと言ったりします。
この機種はまだ日本でも稼働しており、見た事のある医療従事者もいる事でしょう。
第3世代 da Vinci Si Surgical System 2009-

第3世代のダヴィンチです。Siと言い、2台のサージョンコンソールでシンクロしたりする事ができます。
また、見た目も少し異なり、少しずつコンパクトになっている事がわかります。
第4世代 da Vinci Xi Surgical System 2015 –

2017年現時点ではこのXiが最新機種です。
見た目が大幅に変更されました。
世代が進むにつれて何が違うのかというと、コンパクト差や細かな付加価値が異なります。
震えの減衰システムの高機能化やカメラの高解像度など世代が進むにつれてやはり更新されつづけているのです。
ダ・ヴィンチでできる手術について
現在保険で認めらている手術は
- K843-3:腹腔鏡下前立腺悪性腫瘍手術 95,280点
- K773-5:腹腔鏡下腎悪性腫瘍手術 70,730点
の二つだけです。
今後増えて行く予定で、現在先進医療で行っているものが保険適用になっていきます。
内視鏡下手術用ロボットを用いた腹腔鏡下胃切除術
根治切除が可能な胃がん
(ステージI又はIIであって、内視鏡による検査の所見で内視鏡的胃粘膜切除術の対象とならないと判断されたものに限る)
内視鏡下手術用ロボットを用いた内視鏡下咽喉頭切除術
中咽頭がん、下咽頭がん又は喉頭がん
(TNM分類がTis、T1又はT2、NO及びMOである患者に係るものに限る)
内視鏡下手術用ロボットを用いた腹腔鏡下広汎子宮全摘術
子宮頸がん
(FIGOによる臨床進行期分類がIB期以上及びIIB期以下の扁平上皮がん又はFIGOによる臨床進行期分類がIA2期以上及びIIB期以下の腺がんであって、リンパ節転移及び腹腔内臓器に転移していないものに限る)
ダ・ヴィンチ以外の医療ロボット
現在医療用ロボット市場においてダヴィンチの独壇場が続いています。
じつは他にも医療用ロボットというのは存在しています。
妙手A
中国は天津大、南開大、天津医科大の共同プロジェクトとして、da Vinciに瓜二つの「妙手A」という名称の手術ロボットを開発しています。
値段もかなり安いのが特徴でうす。
ただ、ダヴィンチにかなり似ていて、かなりパクってます。
なので、あまり信用されず売れてませんし買う勇気もいります。
中国ではそこそこ稼働してるみたいですが、その機能は未知数です。
妙手Aはダヴィンチとの違いに”ロボットの指先の感覚が実際に伝わる”という機能を持っているという噂です。ロボットの最大の欠点を中国の妙手Aは克服しているのでしょうか?
見て見たい気もします。
EMARO
エマロと読みます。
東京工業大学と東京医科歯科大学の両大学発のベンチャー企業であるリバーフィールドから販売される手術支援ロボットです。
ダヴィンチと違いこのロボットアームは空気圧で作動し内視鏡カメラをだけを操作します。
従来ならカメラは助手などが持ち手術部位を映し出すのですが、手ブレや適切な位置そ描出するのが難しいのです。
その仕事をロボットにさせるというのがこのエマロなのです。
IBIS
我が日本でもダヴィンチ同様のロボットは開発されつつあるようで、最大のポイントが空気圧を用いることによって患部に触った力を鉗子につながった空気圧シリンダーを通じて術者にフィードバックできるという機能です。
従来のダヴィンチにはこの触覚という機能がないのが最大のデメリットでした、今後そういった機能がついたロボってが次々に登場するでしょう。
このIBISの優れているところは触覚があるという事とダヴィンチよりはるかにコストが安いという事でしょう。
また、日本製でありなんだか安心です。
実用化は4-5年後という事なので、発売されたら爆発的普及にいたるでしょう!!
NEDO/オリンパス/東大開発 内視鏡手術支援ロボット
日本のオリンパスも同様の機械を開発中です。
こちらも4-5年後の発売を目処に開発されています。
がんばれ、オリンパス。